CREATE Shop Internship @ Robotics Factory
LIDAR Prototyping Modules
At a Glance
I developed a set of plug-and-play LIDAR prototyping modules using both 1D time-of-flight sensors and 2D scanning LIDARs. The project includes building standalone demo boards, designing a lightweight custom C library for consistent data acquisition and motor control, and showcasing the capabilities through an interactive sample application. Together, these tools provide a flexible foundation for rapid experimentation, robotics prototyping, and sensor-driven product development.
1 D Lidar Module
Electrical Prototype
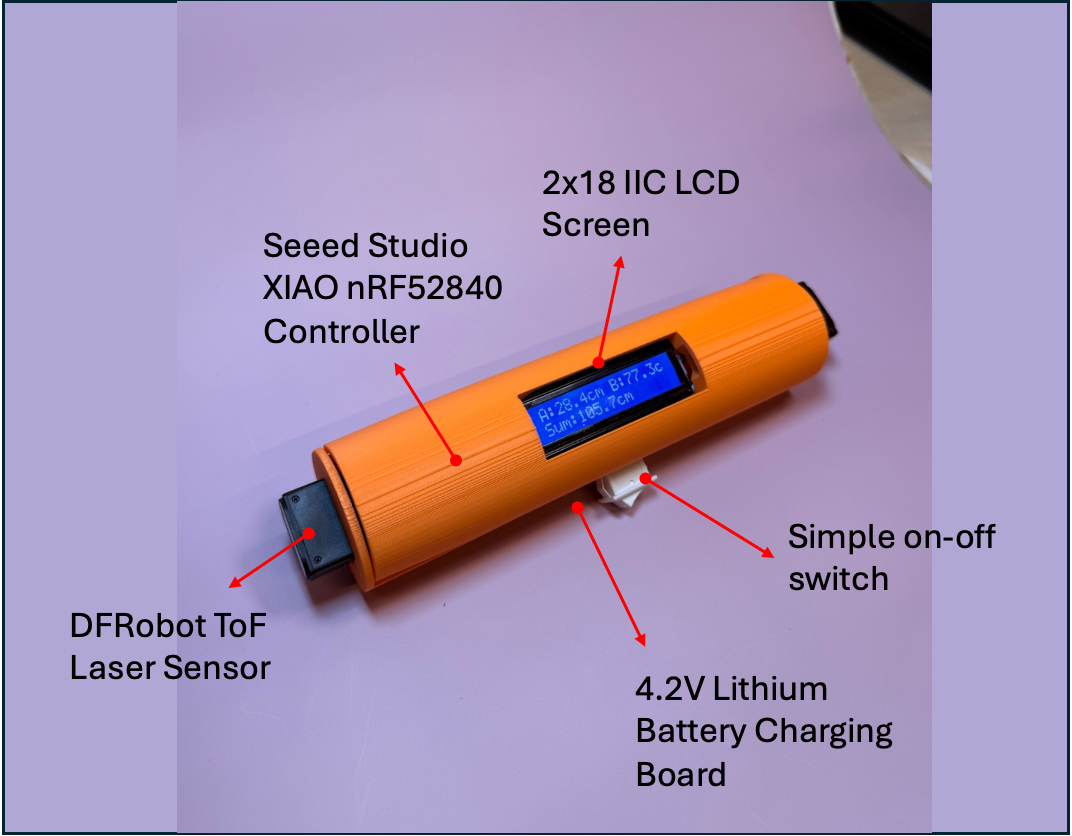
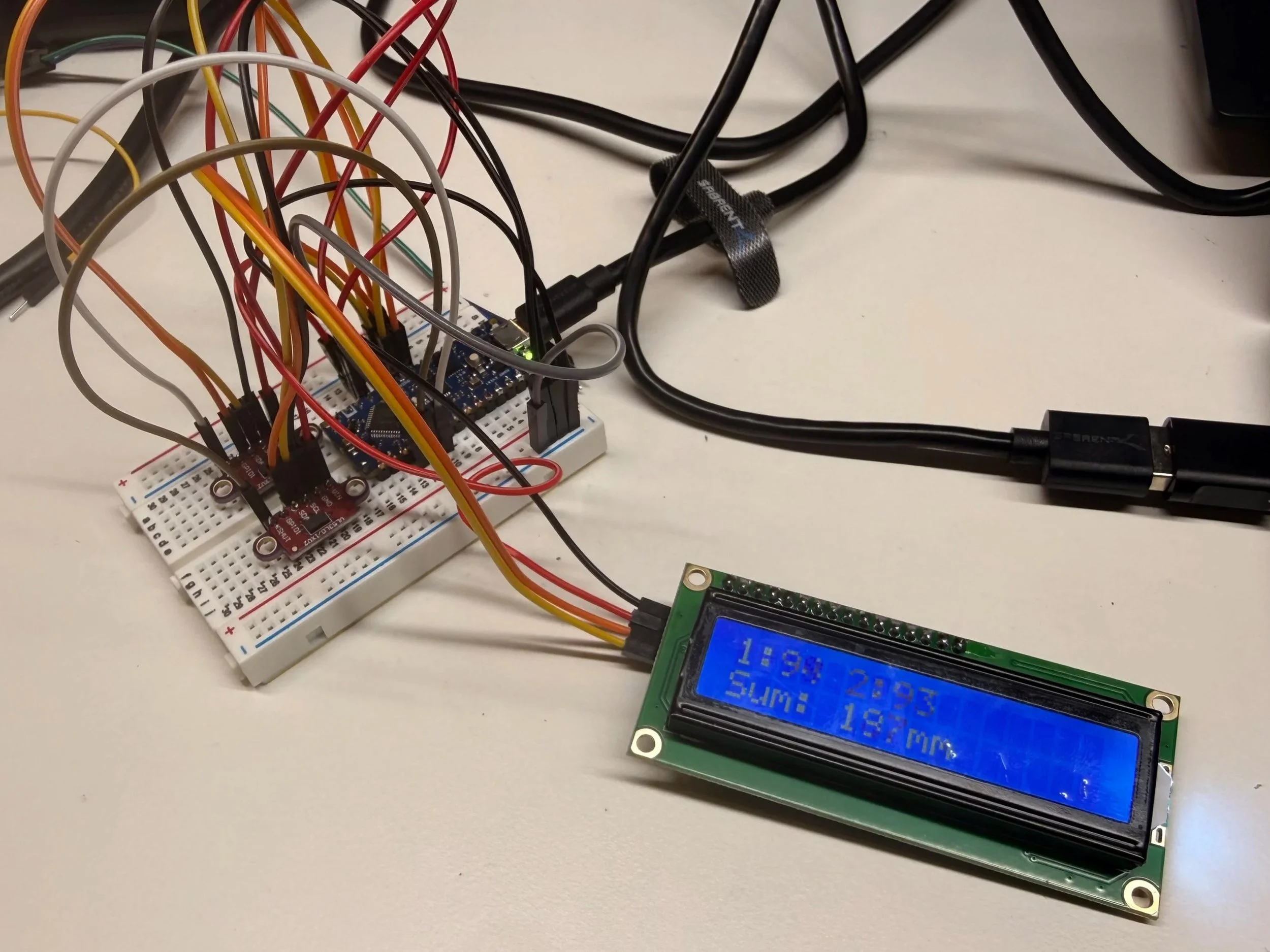
A simple prototype with a pair of 1-D time of flight sensors and a 16x2 LCD display was built using an Arduino Nano Every to test different sensor capabilities
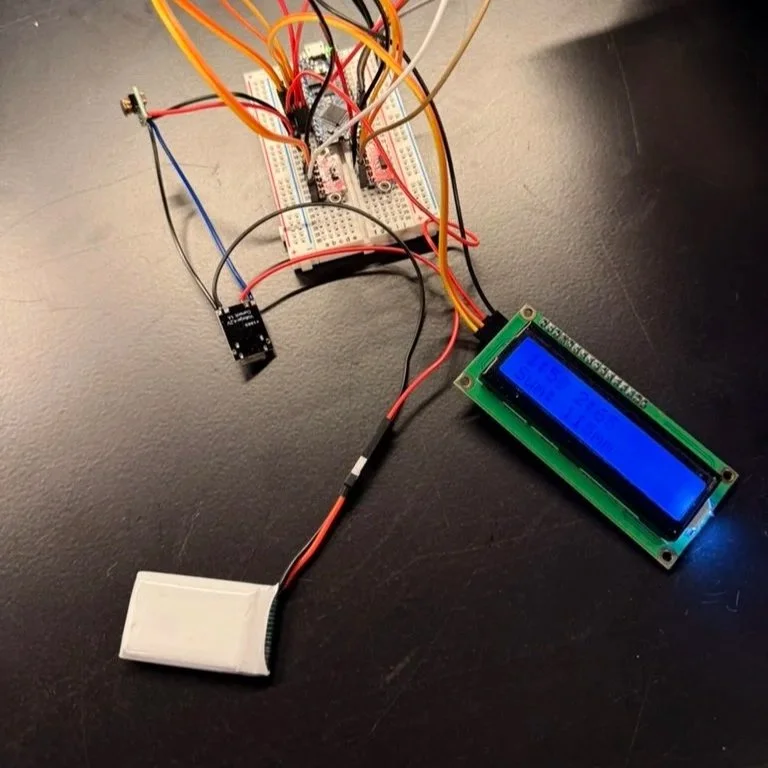
Power Management System
A Li-po battery is used through a charging module and a step up boost converter to power the entire set-up at 5V
2 D Lidar Module
Electrical Proof-of-Concept
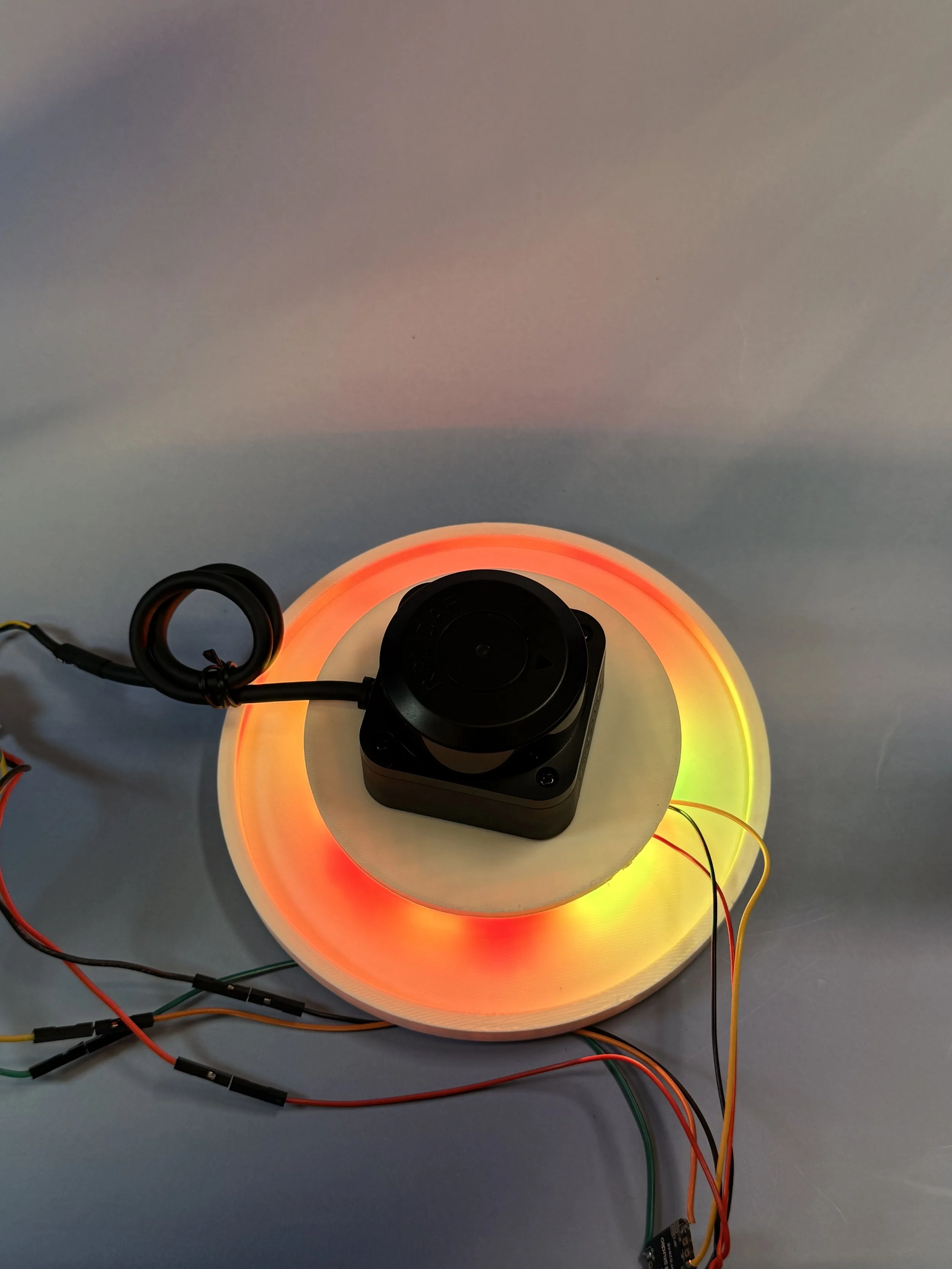
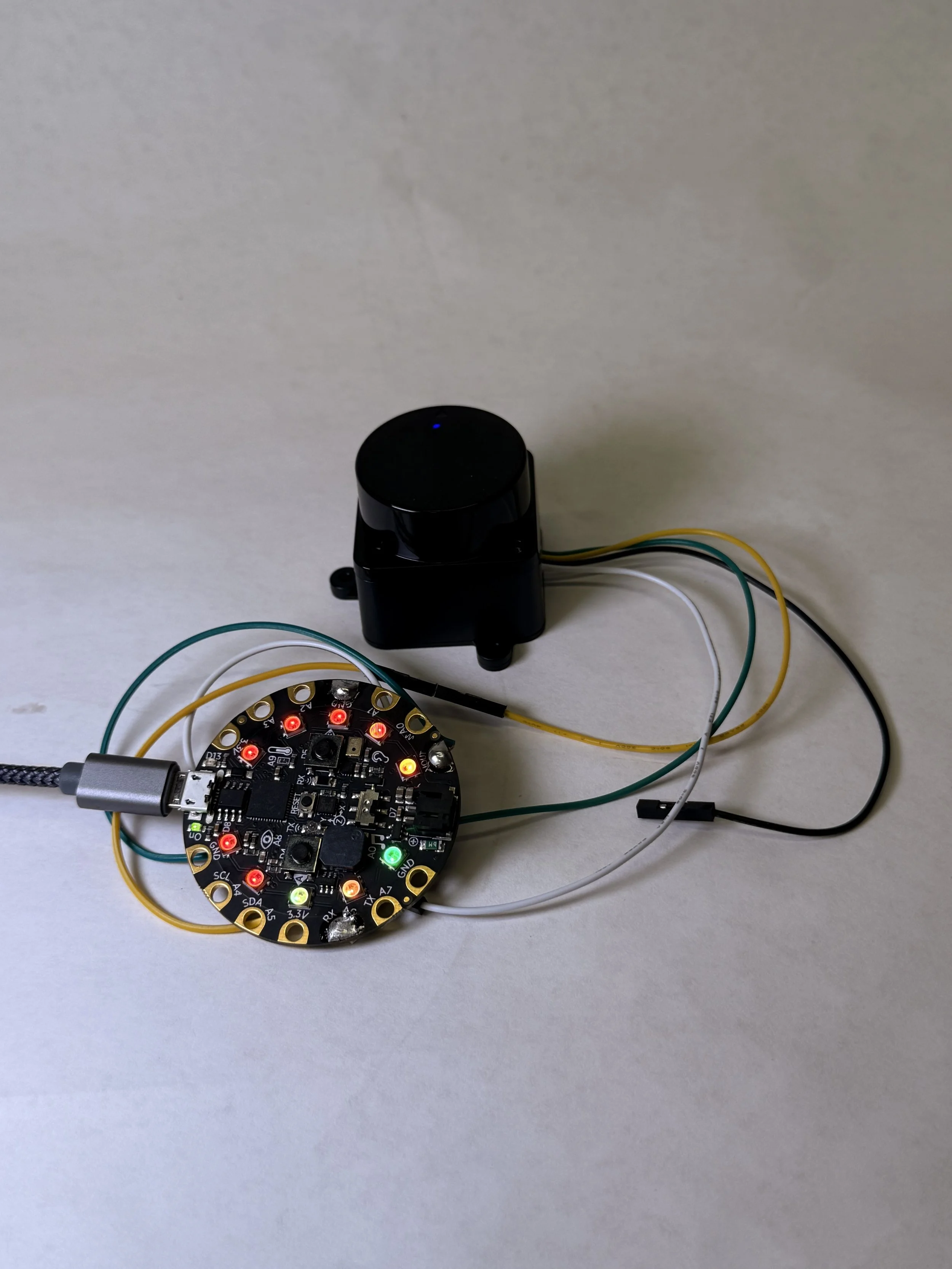
Compared to 1-D’s implementation, the 2D scanning lidar produces extremely dense data (1 distance from the 1D compared to an array of distances). This made me move away from using any screens to display the depth data, and I used an Adafruit CPX to explore the possibility of using LED’s to show the distance data of the 2D lidar.
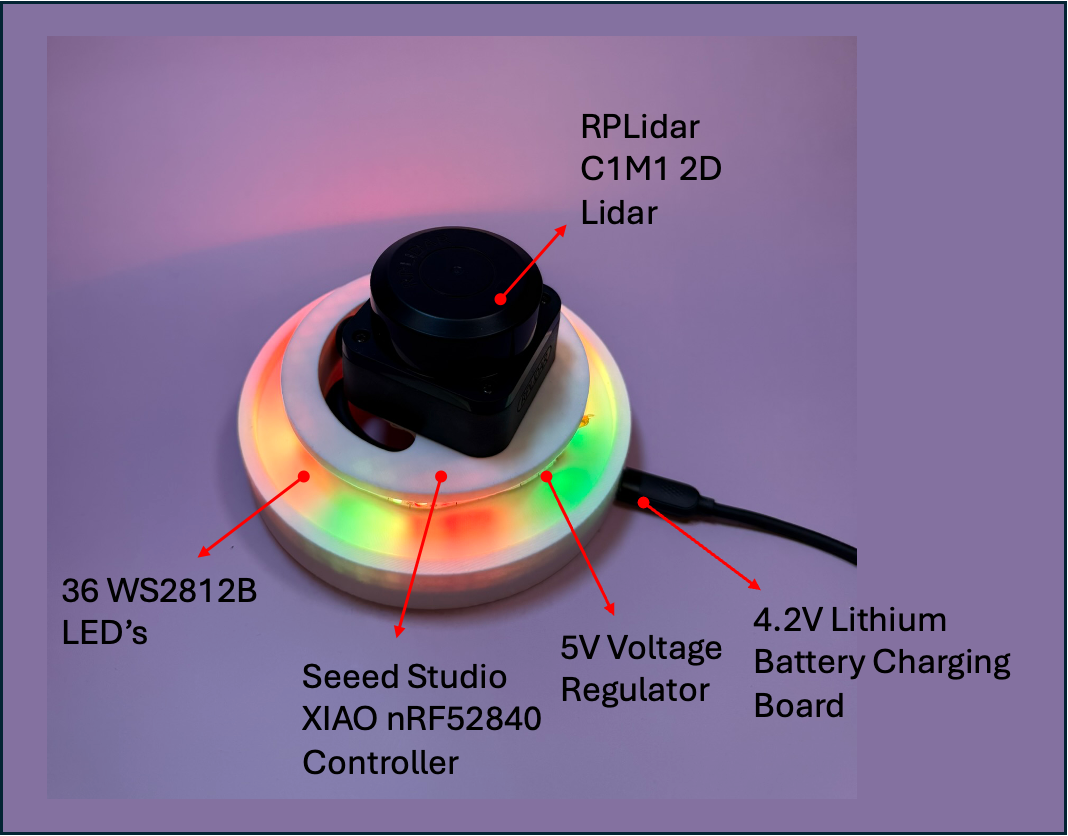
Electrical MVP using WS2812B/NeoPixels
A small Seeed Studio Xiao Dev board is paired with dense WS2812B LED’s to create the electrical components for this prototyping/test module.

Light Enclosure Prototyping
A simple enclosure and recess for LED were created using Fusion360 and a 3D printer to test how the light will diffuse and be projected onto the surface.